葛世荣院士:智能采运机组自主定位原理与技术
本文转自:全国能源信息平台
【能源人都在看 , 点击右上角加'关注'】

文章图片
文章图片
针对我国煤矿智能化发展现状 , 总结归纳出“控制工作面开采装备在煤层中自适应截割”与“保持采运机组在连续推进过程中的直线度”是智采工作面装备运行的2个核心问题 。实时获取采煤机在工作面的位置和姿态信息是解决这两个问题的关键 。
智采工作面装备运行的2个核心问题是控制工作面开采装备在煤层中自适应截割、保持采运机组在连续推进过程中的直线度 。
研究指出解决这2个问题必须实时获取采煤机在工作面空间的准确定位信息 。通过对比分析国内外采煤机定位系统的技术原理和硬件架构 , 发现开发采煤机定位误差消减算法是在井下GPS拒止环境下保证采煤机长时定位精度的关键途径 。
文章图片
文章图片
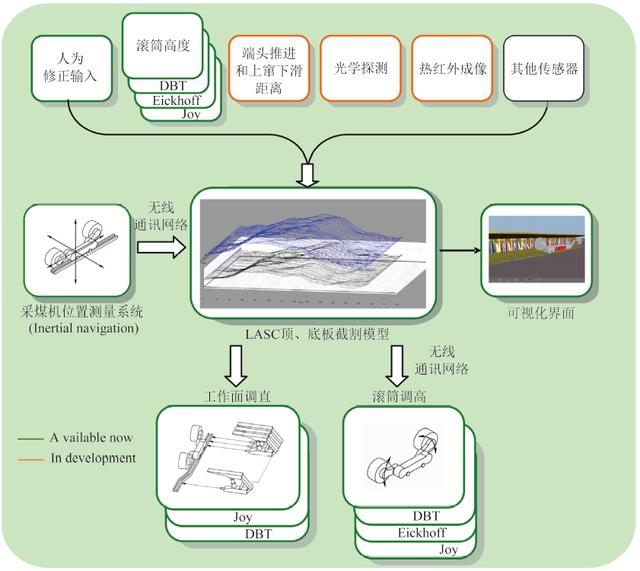
LASC综采工作面自动化技术框架
根据采煤机定位原理可知 , 采煤机定位误差主要来源于惯性导航安装偏差和惯性导航系统随机误差 。惯性导航安装偏差是确定性误差 , 采用基于两点法的确定性偏差补偿算法可使定位误差减小99.12% 。针对采煤机运行状态的非完整性约束特点 , 基于采煤机运动学模型的闭合路径优化算法和动态零速校正算法分别使采煤机定位误差降低了50%和30% 。
文章图片
文章图片
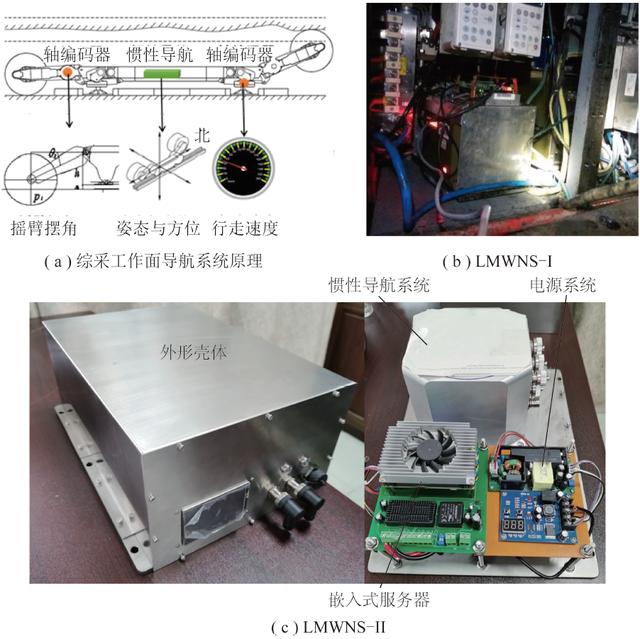
长壁综采工作面导航系统
采用信息滤波模型将闭合路径优化算法和动态零速校正算法进一步融合 , 抑制了惯性导航系统航向角的漂移 , 抑制了惯性导航系统航向角的漂移 。
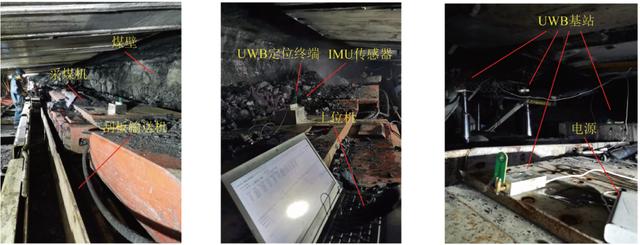
利用UWB基站群自主迁移方法实现了采煤机在工作面端头定位 , 采用VB-UKF算法平滑采煤机定位过程中时变的测量噪声 , 增加了运动轨迹的平滑性 , 使得 IMU/UWB紧融合的定位轨 迹更加精确 , 为惯性导航系统提供校准的基准 。
文章图片
文章图片
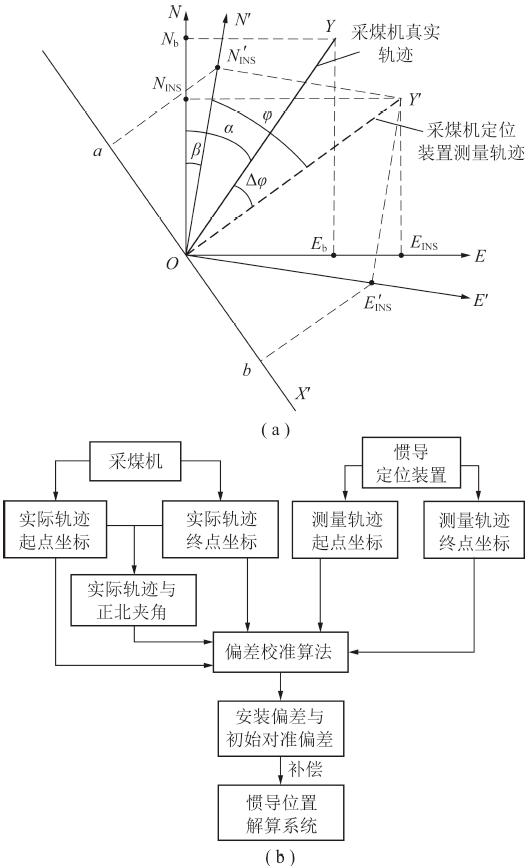
确定性偏差补偿算法原理和流程
基于采煤机定位轨迹的刮板输送机轨迹检测方法实现了刮板输送机形状在线监测 , 为综采工作面弯曲度自动化检测和校直提供理论基础和试验数据 。
文章图片
文章图片
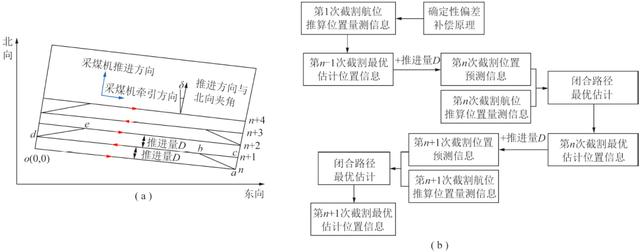
采煤机截割工艺运行过程与闭合路径最优估计模型流程
文章图片
文章图片
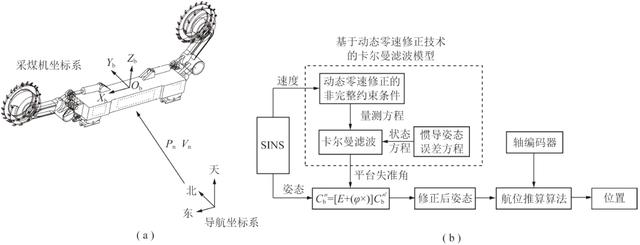
坐标系关系和基于动态零速修正技术的采煤机惯性导航定位流程
葛世荣院士团队的采煤机定位技术
葛世荣院士团队借鉴无人驾驶汽车原理 , 首先结合精细物探技术构建了工作面煤层三维模型 , 以此作为采煤机定位导航地图 。该煤层模型顶底板曲面以0.8 m×0.8 m栅格形式存储 , 与煤层钻探数据对比 , 平均煤厚误差0.02 m , 高程平均误差±0.125 m 。
文章图片
文章图片
井下现场实验环境及布局
- 新春走基层 | 诸暨:助企牵红线,院士解难题
- 王者荣耀|王者荣耀诸葛亮星域神启背景故事
- 王双明院士:“双碳”目标下煤炭开采扰动空间CO2地下封存途径与技术难题探索
- 长葛市:三管齐下优化“非接触式”办税服务
- 数码宝贝新世纪葛叶兽PVE插件选哪个(数码宝贝新世纪葛叶兽PVE插件最优选择指南)
- 王者荣耀1月28日更新了什么(刘邦6元皮肤诸葛亮典藏皮肤上架)
- 王者荣耀|诸葛亮新皮肤的名字叫什么(王者荣耀1月28日每日一题答案)
- 王者荣耀|诸葛亮-星域神启特效是什么样的?诸葛亮荣耀典藏皮肤一览
- 香港城大王钻开教授、吉大于吉红院士等联手《Nature》:突破266年物理效应,实现1000℃超浸润和高效液冷降温
- 王者荣耀诸葛亮绝代智谋礼包值得抽吗(王者荣耀绝代智谋礼包概率分析)