葛世荣院士:智能采运机组自主定位原理与技术( 二 )
该煤层模型以2000国家大地坐标系为参考坐标系 , 经过坐标变换可转换为局部东北天地理坐标系 , 作为长壁综采工作面导航系统的定位参考坐标系 。然后开发了长壁综采工作面导航系统(Longwall Mining Workface Navigation System , LMWNS) 。
文章图片
文章图片
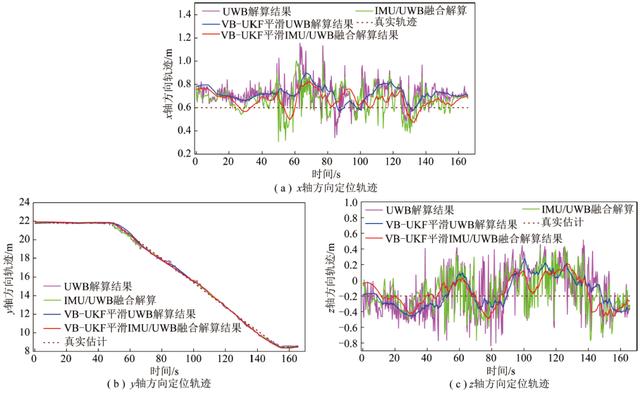
井下现场实验IMU/UWB紧融合定位的3个坐标轴方向定位轨迹
长壁综采工作面导航系统基本原理是 , 利用安装于采煤机机身的具有自动寻北功能的惯性导航装置测量采煤机机身的运行方位与姿态、采煤机行走部轴编码器和截割部轴编码器测量的行走距离和摇臂摆角 , 通过相关算法实现采煤机在工作面煤层中的定位 , 获得采煤机的运行轨迹和截割轨迹 。LMWNS-II由惯性导航系统、嵌入式服务器和电源系统构成 。
文章图片
文章图片
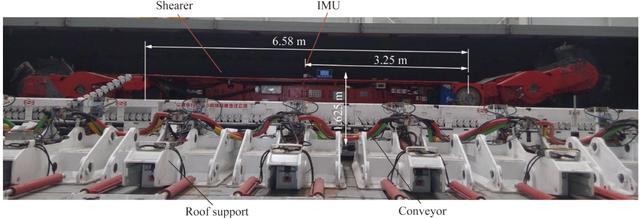
现场综采工作面刮板输送机轨道检测布置

文章图片
文章图片
创新点
(1) 提出了基于两点法的确定性偏差补偿算法 , 构建了采煤机闭合路径的最优估计模型 , 建立了动态零速修正技术的采煤机惯性导航定位算法模型 , 采用信息滤波融合动态零速修正模型和闭合路径模型 , 实现了采煤机定位精度的提升 。
(2) 利用工作面端头UWB基站群自主迁移 , 实现了采煤机惯导与UWB组合定位 , 为采煤机惯性导航系统提供动态校准基准 , 能够消减机载惯导定位系统长时间累计误差 。
(3) 提出了基于采煤机定位数据的刮板输送机形状监测方法 , 结合综采工作面采煤工艺 , 利用刮板输送机检测轨迹 , 建立了刮板输送机调直算法 , 实现了采运机组不停机的刮板输送机连续动态调直 。
作者简介

文章图片
文章图片
葛世荣 , 男 , 1963年4月生 , 浙江天台人 。中国工程院院士 , 中国矿业大学(北京)校长、教授、博士生导师 , 国家973计划项目首席科学家 , 国家杰出青年基金获得者(2002) , 兼任世界摩擦学理事会副主席、煤矿智能化与机器人创新应用应急部重点实验室主任、国家矿山安全监察局矿山智能化专家委员会主任、中国煤炭工业安全科学技术学会副理事长等学术职务 。
主要成果
长期从事煤矿运输理论技术与装备研究 , 提出了摩擦运输传动可靠性理论方法 , 创设了深井提升重载化、巷道运输自动化关键技术装备 , 攻克了煤矿井下智能化采运协同调控关键技术 , 其多项重要研究成果在我国煤矿广泛应用 , 为大型煤矿安全高效开采提供了可靠运力保障 , 推动了我国煤矿智能化采运技术发展 。成果获国家技术发明奖二等奖3项、国家科技进步奖二等奖1项、国家科技进步奖三等奖1项 , 独立和共同发表论文300余篇、授权发明专利30余项、出版学术著作5部;被授予何梁何利科技进步奖、全国创新争先奖、全国优秀科技工作者、中国青年科技奖等10多项学术荣誉 。
来源:
葛世荣,王世佳,曹波,等. 智能采运机组自主定位原理与技术[J]. 煤炭学报,2022,47(1):75-86.
免责声明:以上内容转载自煤炭学报 , 所发内容不代表本平台立场 。
【葛世荣院士:智能采运机组自主定位原理与技术】
- 新春走基层 | 诸暨:助企牵红线,院士解难题
- 王者荣耀|王者荣耀诸葛亮星域神启背景故事
- 王双明院士:“双碳”目标下煤炭开采扰动空间CO2地下封存途径与技术难题探索
- 长葛市:三管齐下优化“非接触式”办税服务
- 数码宝贝新世纪葛叶兽PVE插件选哪个(数码宝贝新世纪葛叶兽PVE插件最优选择指南)
- 王者荣耀1月28日更新了什么(刘邦6元皮肤诸葛亮典藏皮肤上架)
- 王者荣耀|诸葛亮新皮肤的名字叫什么(王者荣耀1月28日每日一题答案)
- 王者荣耀|诸葛亮-星域神启特效是什么样的?诸葛亮荣耀典藏皮肤一览
- 香港城大王钻开教授、吉大于吉红院士等联手《Nature》:突破266年物理效应,实现1000℃超浸润和高效液冷降温
- 王者荣耀诸葛亮绝代智谋礼包值得抽吗(王者荣耀绝代智谋礼包概率分析)