集度激光雷达自动驾驶技术方案首次曝光
4月18日 , 在集度汽车的媒体沟通会上 , 集度公布了其首款车型汽车机器人概念车采用两颗激光雷达的方案 。
从概念车产品图来看 , 激光雷达分别搭载在集度首款车型的车前盖左右两处 , 采用了禾赛科技的AT128半固态激光雷达 。
会上 , 集度汽车智驾负责人王伟宝透露 , 英伟达的车载芯片Orin、禾赛的半固态激光雷达均已上车参与集度自动驾驶系统的测试 。这是集度汽车的激光雷达自动驾驶技术方案首次曝光 。
文章图片
文章图片
图源:集度汽车
【集度激光雷达自动驾驶技术方案首次曝光】在去年12月 , 集度汽车在其SIMUCar(软件集成模拟样车 , SoftwareIntegrationMuleCar)上完成了城市域和高速域的自动驾驶测试 , 还是基于纯视觉算法方案 。
不过在18日公布的集度汽车的SIMUCar2.0中 , 集度表示 , 两颗激光雷达传感器已经加入其自动驾驶系统 , 并与集度的自动驾驶智能架构JET1.0(JIDUEvolvingTechnology , 包括电子电气架构+SOA)实现融合 。
显然 , 对于智能驾驶的实现 , 集度汽车也认为 , 激光雷达有更安全的冗余能力 。
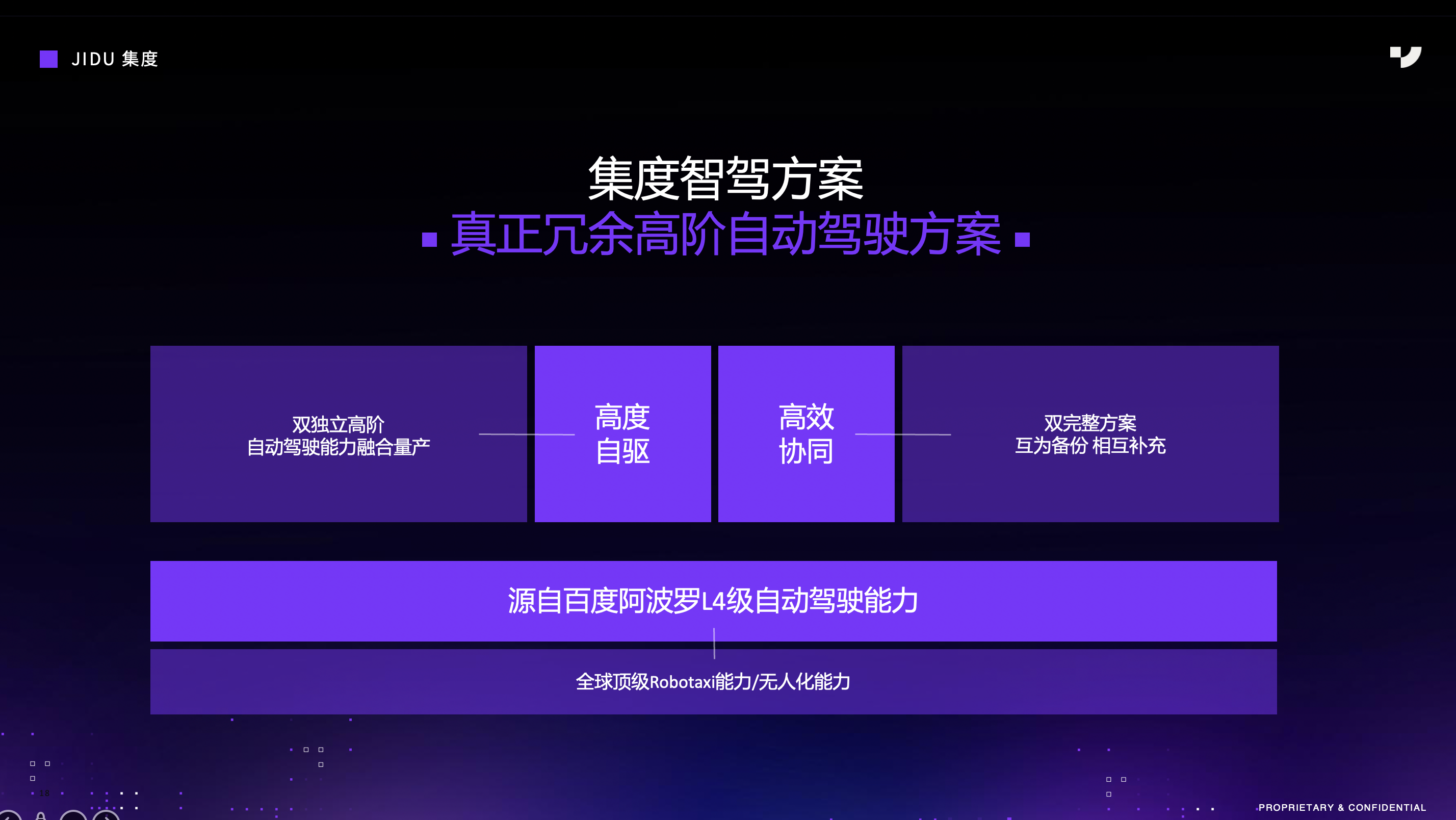
不过 , 搭载激光雷达 , 也不意味着集度就此放弃纯视觉路线 。据王伟宝表示 , 集度的纯视觉和激光雷达自动驾驶方案 , 是独立运行的两套系统 , 互为备份相互补充 。
日前 , 英特尔子公司Mobileye也展示了其自动驾驶汽车在以色列行驶的行驶状况 , 其车辆也搭载了两个独立的感知系统:一个仅采用摄像头 , 另一个采用了激光雷达和雷达的结合 , 以实现自动驾驶感知的真正冗余 。采用两套互为冗余的独立感知系统 , 或是自动驾驶行业的一大趋势 。
据王伟宝介绍 , 双激光雷达的点云视场更广、更安全 , 相比单雷达设计的120度FOV(视场角) , 车头双雷达可实现水平180度的FOV覆盖 , 在“鬼探头”、左右有遮挡物等行车场景中 , 对左右横穿行人或障碍物的识别能力更强 。
其次 , 是对车辆重点区域的识别更精准 , 在车辆正前方60度FOV的区域内 , 双激光雷达可做到加倍重叠 , 目标物上的点云数据更多 , 识别准确率更高 。
第三 , 在高阶自动驾驶的冗余安全方面 , 双激光雷达可互为安全冗余 , 比单激光雷达方案的可靠性更强 。
文章图片
文章图片
图源:集度汽车
王伟宝认为:SIMUCar1.0阶段像是一个人的小学阶段 , 是打好基础的关键期 , 更专注于自动驾驶的基础能力建设 , 包括软件架构和相关基础功能逻辑的开发 , 并与底盘适配 。
SIMUCar2.0则像中学阶段 , 是逐渐提升并形成基础能力的时期 , 在这个阶段 , SIMUCar的底层架构已升级为集度自研的高阶自动驾驶智能化架构JET , 包含电子电气架构EEA和整车操作系统SOA 。此时相关的域控制器和传感器 , 已逐渐达到量产状态 , 一些基础的自动驾驶能力 , 包括ADAS功能 , 泊车 , 智能交互等 , 都会逐渐达到量产状态 。
集度方面还透露 , 已启动后续车型的研发和预研 , 旗下第二款量产车将有望在今年年底的广州车展发布 。
- 精准支撑双碳目标 揭秘首颗激光二氧化碳探测卫星
- 国产品牌开启激光微投时代
- 国网肥城供电公司完成110千伏线路激光雷达三维建模
- 清除异物用上了“激光剑”湖北电网首次应用便携式线激光
- 天文学家探测到距离地球50亿光年的强大“星系空间激光”
- 中国首个海洋监视监测雷达卫星星座正式建成
- 电视新秀——激光电视,出台标准了!首个行业标准实施 激光电视出货量将突破百万
- 中国长城推出全自动12寸晶圆激光开槽设备
- 济宁机器人产业脉动6丨济宁能源建成多轴机器人激光熔覆工作站
- 小米测距仪怎么用(小米智能激光测距仪详细介绍)