科学家开发出基于FBG传感原理的触觉传感器应用于微创手术组织触诊
近日 , 中国科学院深圳先进技术研究院医工所微创中心研究员王磊团队在基于布拉格光栅光纤传感原理在微创手术的应用——活体组织触诊的研究中实现了活体组织的精准力信息反馈和肿块信息的定位检测功能 。相关研究成果以Development of a Fiber Bragg Grating-based Force Sensor for Minimally Invasive Surgery ―Case Study of Ex-vivo Tissue Palpation为题 , 发表在IEEE Transactions on Instrumentation and Measurement上 。
随着医疗技术的快速发展 , 微创手术(MIS)逐渐成为现实 。但是 , 传统手术中发现的一些问题仍与MIS有关 。例如 , 在进行微创外科手术期间 , 医护人员会暴露在手术室中发现的放射线和整形外科危害中 。引入机器人辅助微创手术的技术成为了比传统微创手术更好的替代方案;然而 , 机器人辅助手术过程中伴随着外科医生的触觉丧失 。外科医生通过操作机器人来进行微创手术 , 手术期间医生无法直接接触人体组织并且分析人体器官 , 因此无法保证所进行的手术的可靠性 。在传统手术过程中 , 医生通过触觉去感知器官的异常情况 , 进而判断器官中是否存在肿瘤和肿块 。但随着医疗机器人的普及 , 这种可获得的触觉信息尚未有效集成到机器人辅助的微创手术中 , 因此要求机器需要具有更高精确度和灵敏度的触觉信息反馈 。深圳先进院科研人员在此基础上提出一种用于微创手术组织触诊中的高灵敏度布拉格光栅光纤(FBG)传感方案 , 与以往的电容式传感方案不同 , 光纤传感器与手术期间的磁共振(MR)系统和成像系统兼容 。
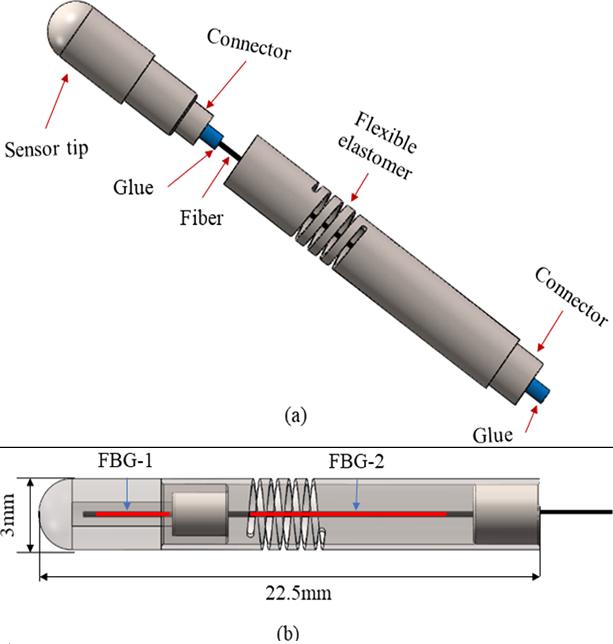
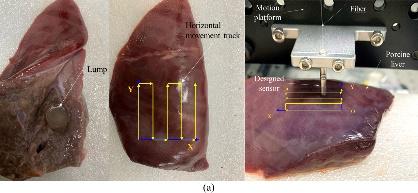
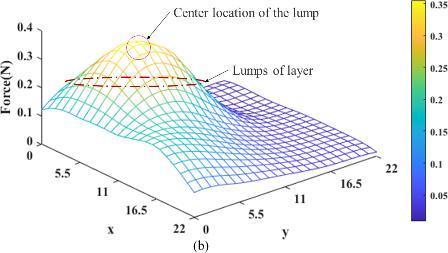
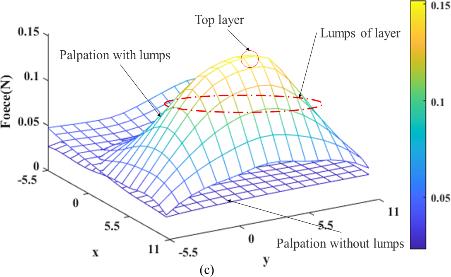
为此 , 研究设计了用于微创手术的一维远端力传感器 。其中 , 传感器结构中嵌有双光栅元件可用于解耦传感器在使用过程中受到的应变和温度交叉影响 , 实现更精准的力觉检测 。研究中 , 科研人员基于双光栅元件结构设计出发 , 推导出相应的柔性结构理论模型 。通过fmincon函数对柔性件进行了基于物理模型的优化设计 , 确定了结构的关键参数 。采用有限元法对柔性件的静态和动态特性进行分析 , 在理论基础上验证了该柔性件的可行性 。为了进一步提高传感器性能 , 并基于前馈神经网络对数据进行标定 , 该网络模型可精准预测力与波长偏移量的关系 。研究还进行了温度补偿实验 , 验证了双光栅元件能够有效的进行温度解耦方案 。实验结果表明 , FBG传感器能够在1N范围内感知力值 , 平均相对误差小于满量程的2%;温度补偿后的误差0.8 mN 。科研人员进一步对猪肝器官进行组织触诊实验 , 验证所提传感器设计在微创手术中的有效性和适用性 。
研究实现了组织触诊中器官肿块信息的精准力反馈和定位检测 , 并提出了新型的温度解耦方案和传感器标定方法 , 为微创手术中手术机器人的触觉信息检测提供了有效技术路线 , 有望推动手术机器人在介入式医疗中的手术路径导航和机器控制中的应用 。
研究工作得到国家自然科学基金、深圳市科技计划等的资助 。
文章图片
文章图片
图1.FBG传感器的三维图
文章图片
文章图片
文章图片
文章图片
【科学家开发出基于FBG传感原理的触觉传感器应用于微创手术组织触诊】
- 人类与AI如何共处?诺奖科学家、将棋天才、“低欲望社会”提出者的不同解答
- 科学家应急研发气溶胶新冠病毒监测系统 40分钟内“揪出”病毒
- 美国密歇根大学科学家发现一种酶,快速减少小鼠脂肪
- 科学家担心:人类或已处在第六次物种大灭绝路上
- 烟台电网首套基于5G网络的纵联差动保护顺利投运
- 科学家利用凯夫拉纤维改进锂硫电池 容量是普通锂离子电池的5倍
- 喜马拉雅山也有了?马里亚纳海沟出现不安的东西,科学家发出警告
- 中科大首次实验实现基于局域操作的最优量子门检验
- 英国航天局资助开发基于激光的新型卫星通信系统
- 云朵软件“基于大数据的‘烟台文旅云’平台”入选文化和旅游部《2021年智慧旅游典型案例》